


MLCC 공정: 불량 검출, 왜 ‘초기 검출’이 답일까? 공정 단계 별 리스크 및 핵심 솔루션
겉으로는 멀쩡한 MLCC, 내부 불량은 언제 생길까요? 공정별 리스크와 불량 확산 구조를 짚고, 초기 검출이 왜 핵심인지 실제 제조 관점에서 풀어봅니다.


1 분
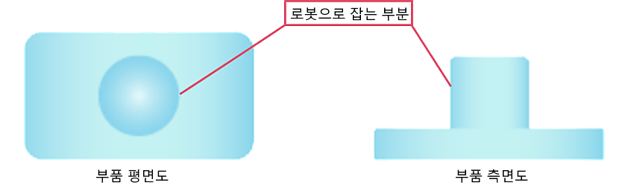
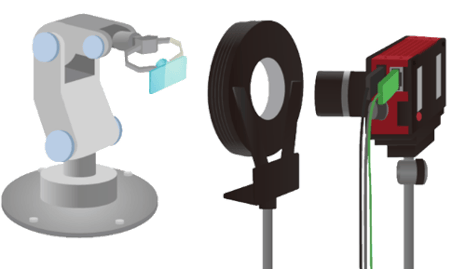
로봇으로 부품을 픽업할 때 생기는 어긋남을 보정합니다!
? BEFORE




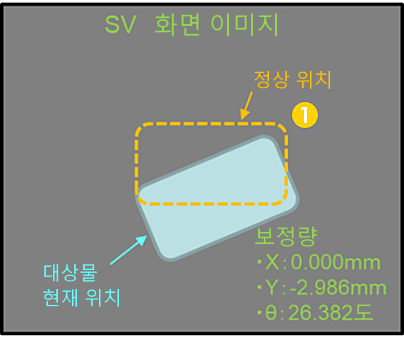
SV 화면 이미지
|
공간 절약
|
일체형이므로 빈 공간에 설치하는 것만으로 바로 사용 가능(제어판내 공간을 차지하지 않습니다.) |
| 위치 보정 | OK/NG 판정 뿐만 아니라, 수치 출력이 가능! 어긋남량을 출력하여 보정할 수 있습니다. |
| 상위 통신 | Ethernet/IP통신(어댑터) 대응! 상위 기기와도 간단하게 통신을 할 수 있습니다. |
