


2차 전지 제조 공정, 대량생산과 정밀도를 동시에 잡는 방법
ESS(에너지 저장장치) 시장이 새로운 전환점을 맞이하고 있습니다. 2차 전지 공정은 전통적 자동차 제조와 차원이 다른 정밀도를 요구합니다. 흥미로운 점은, 수율을 좌우하는...


1 분
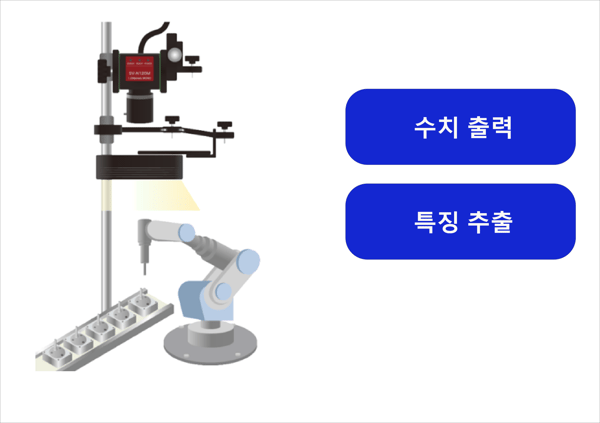
로봇 나사 체결 위치 보정을 화상센서 SV시리즈로 실시!
? BEFORE





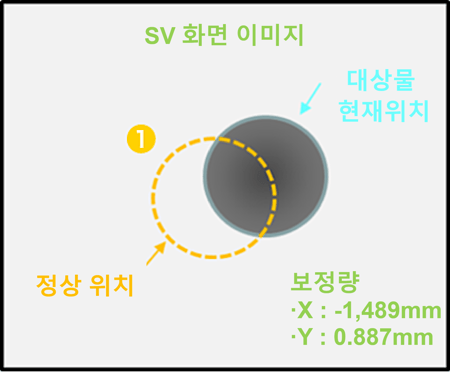
SV 화면 이미지
|
공간 절약
|
일체형으로 빈 공간에 설치하기만 하면 바로 사용 가능.
고정도 측정! 다양한 검사 기능으로 부직포 단면 기준, 부직포 중인심 기준 모두 1/1000 화소 단위로 치수 측정할 수 있습니다. |
| 위치 보정 |
OK/NG 판정 뿐만이 아니라, 수치 출력이 가능! 어긋나는 양을 출력하고 보정을 실시할 수 있습니다.
|
| 상위 통신 |
Ethernet/IP통신(어댑터) 대응! 상위 기기와도 간단하게 통신할 수 있습니다.
|
